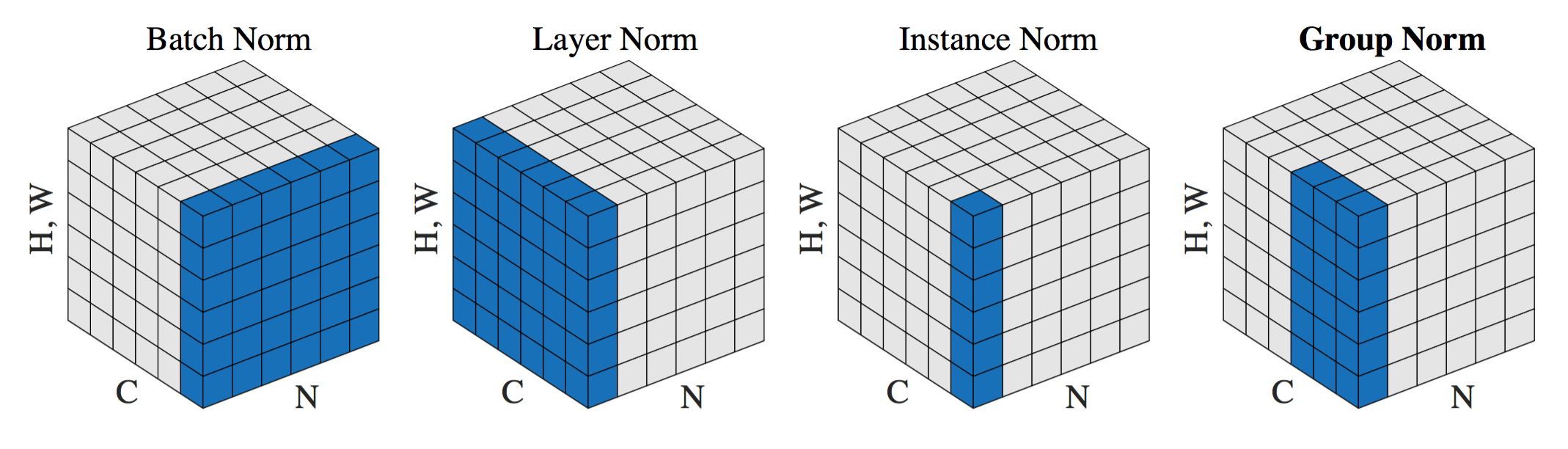
从上图可以看到,其实各个方式只是在不同维度、粒度上进行变化。假设输入的shape为(N, C, H*W),则有:
- Batch Norm:在N维度做normalization,计算$N*H*W$维度的均值与标准差(这里包括图片有点让人误解,其实在H、W上是分别做的,并没有混在一起算均值、方差)
- Layer Norm:在C维度做normalization,计算$C*H*W$维度的均值与标准差
- Instance Norm:计算每一个$H*W$的均值与标准差
- Group Norm:在G维度做normalization,计算$(C//G)*H*W$维度的均值与标准差,其实GN是LN与IN的折中方法。
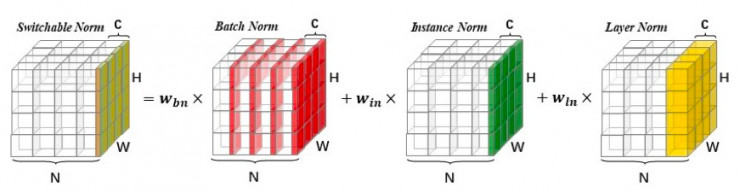
自适应归一化SN(Switchable Norm)如下:
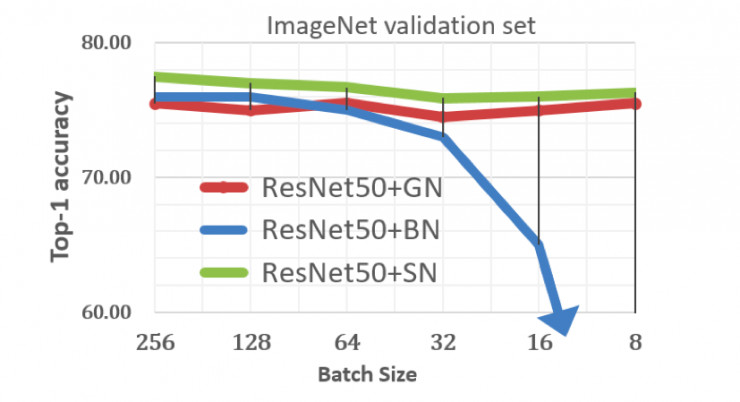
效果图如下: